Project Shelob
Project Shelob is a hexapod robot that uses ROS and Python to solve complex navigation problems.
Inverse Kinematics
Apr 10, 2021
There are two type of solutions that I would like to try on this project:
- Using Inverse Kinematics “from the ground up” as the Phoenix Code in some low-level language that could be used directly on the robot. There are a couple of good examples of people solving the 3DOF leg problem using JavaScript and C++ this way.
- ROS (Robotic Operational System) IKFast library, which is a more “academic” approach as I understand. From someone that worked in mechatronics engineering laboratories as an undergraduate student for a couple of years with robots running on ROS, this is something maybe too close to home for my comfort, but it’s an alternative.
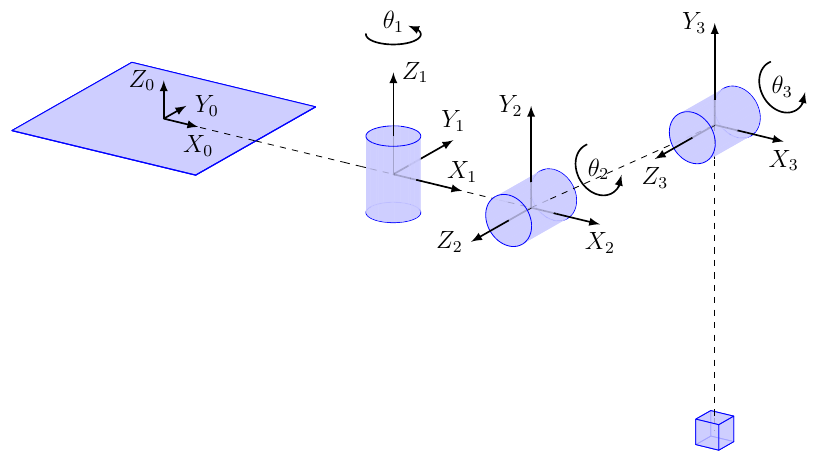
In anyway, here is the modeling for a leg of the hexapod: